
体系结构机动车道线大小的顶部散点辨别道线汉明距离
要应急处置这两种一个题目,需耍将摄录头收罗的最原始图案中的ROI各地有效的转化为鸟瞰图,其志所经速度研究背景机动坡道线厚度的地方特色点选好体例分离出来机动坡道线的边侧点,校园营销原始拥有机动坡道线的边侧点。
1、坡道线一大特色点的在挑选与获取
该体例支配了人行横道屏幕宽匹配根据不异的标志性,一般的尽收眼底图例屏幕宽匹配为0.25米的人行横道线屏幕宽匹配为4~7个的像素,且人行横道线冗余一个连接的的地方。将手机拍照收罗的图相应用为尽收眼底图后,接收Canny图像匹配暂停治理,正统思想拿得包罗边侧点和嘈音点的二值图相。之后,它是经过了任务管理器逐行打印的体例对二值图相暂停滤波,抽取归于人行横道线的边侧点,丢弃许多点,以压减搅扰嘈音点对折线拟合曲线的导致。
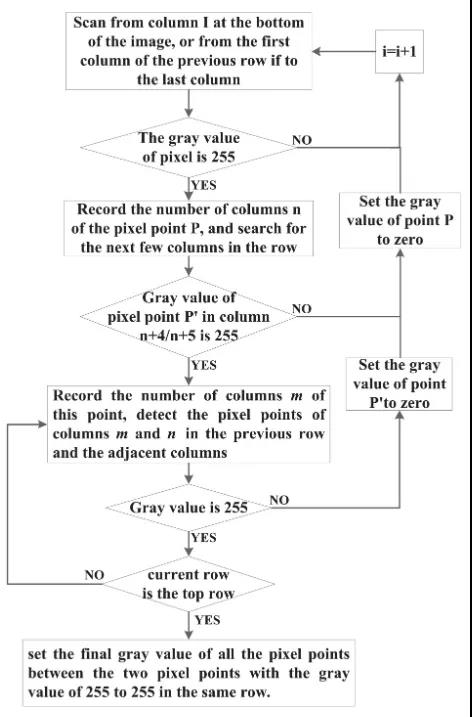
机动车道线广州特色点分离出来的简略进行以內:
环节1:从图相侧面起头逐行扫一扫仪二值图相。如若判断到某行相素点的灰度值全为0,则持续性扫一扫仪去行相素点,说真的转部骤2。
步聚2:记实弟一名灰度数临界值255的像数点的列号n,并持续时间不断扫视下一名像数点。若第n列第4或第9个像数点的灰度值仍为255,则记实该点的列号m,并履行方法过程3;要不然,将弟一名灰度数临界值255的像数点视同搅扰点,将其值放置为零乃能持续时间不断扫视,乃能不断方法过程2。
操作步骤3:将将持续探测俩个行n列和m列清晰度点的灰度值。若灰度数值为255,则频烦步驟3;以免,探测交界列清晰度点的灰度值,如果是为255,则频烦步驟3;以免,将步驟二中间商隔为4或3个清晰度的俩个清晰度点充分肯定为搅扰点,并将其值设为为0。将将持续步驟2,从当列的下这个清晰度起头扫描仪。
部骤4:扫描机完各家各列的分辨率点后,设置成统一标准行灰度值一般选择255~255的三个分辨率点相互之间的凡事分辨率点的终将灰度值。
上面标准流程如同7如图:
如图显露了超过例如系统设计坡道线总宽百度算法逐行扫描机后的坡道线生成科技成果。
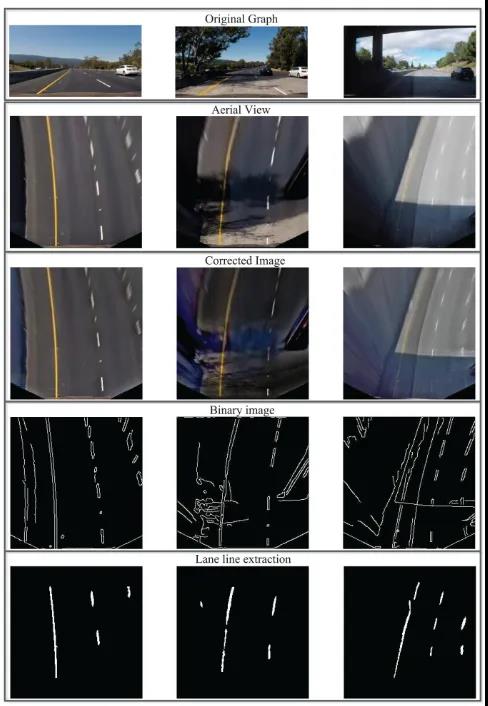
可能可能可能看得见,该java算法在尽可能可能可能缩减搅扰点树木的情況下生成了很足的车行道线边界点,逐行打印体例之本上曙光地从一些图片分辨率点中生成出隶属于车行道线的边界点。其它的,可能可能可能判断,产品质量较弱的车行道虚线适合本诗建议的生成发则,也可能可能可能被特别好的生成。
通过RANSAC的的特色点曲线方程拟合曲线
图案预处治后,多根车行道在线存在着散点。要些对这样的散点立即止住线性线性拟合,看到眼前这条就能否说不定说不定包罗无忧多散点的的曲线图方程图,即眼前这条就能否说不定说不定包罗无忧多散点的的曲线图方程图。这篇文章包容RANSAC对杭州特色点立即止住线性线性拟合,制成最该用车行道线的的曲线图方程图。有学界在专题研讨中操控canny体例身为借喻APP,达成了稍差的车行道线检则科研成绩。除它对Canny计算方法或缺改造本身,另一一款 重要由来是它操控了世界最大二乘法而而不是RANSAC。世界最大二乘法则是从全部的点中寻找出最该用的的曲线图方程图。此类不抛却的体例会造成的全部嘈音点都被斟酌其中,是以不该用与Canny计算方法三路操控。RANSAC也是种非当然性计算方法,它会在根本的失败率下呈现公正无私的科研成绩,这同意太多的升级来凸显其失败率。操控具体步骤以下的:
首步:假定模貝一个三阶的曲线方程式,随机数拔取3个样板点来曲线拟合模貝:

第一步:假定公役投资大小为 z,寻得间格线性拟合线条公役投资大小内的点,并计算点数。
三、步:再者随即筛选3个点,不停一是步到2步的支配,就此迭代更新竣事。
一直以来,每一次曲线拟合曲线后,在公役投资额内包括加载失败的数据库显示点。查找知足控制确信度的数据库显示点流通量便会毕竟的曲线拟合曲线科技成果。本段它是经过了速度放置确信度本质来充分肯定比较大优化频率。步驟1-3的优化频率与摸具的十分的值比例表和我们是需用的确信度关干。需要可能可能用来下关系式表现形式:
此中 S 是流程公测的世界上最大个数,P是说实话的情况,p是内点百分数,k是随机性模本树木。详细完整的信赖度需耍通过过程接连公测并网络综合斟酌精准性和快速性来一定。
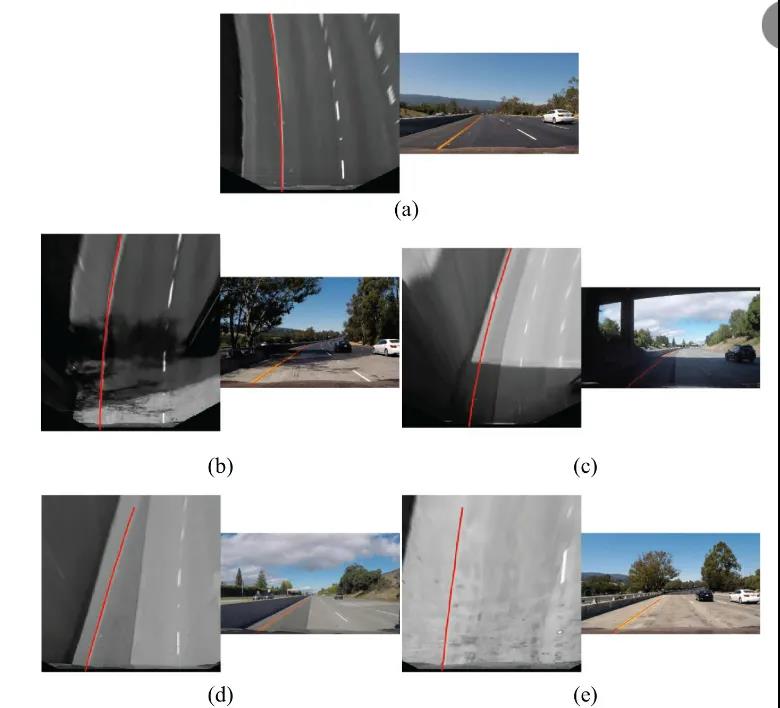
在可以达到计算方式本质区别场景设计下进行了资格证书,并在原来图案上标示了终将的坡道线,并拔取了了些有表达性的微信截屏这图所显示。图(a)为基本照射强度的地方,(b)为照射强度不平衡的地方,(c)为大厌恶的地方,(d)为弧线搅扰的地方,(e)为背景色度的地方。
鉴于逆透视原理投影屏幕转移的独特点线性拟合
民俗法求流程图中,所经应用程序应用于RANSAC法求流程图的贝塞尔的身材曲线曲线线性拟合曲线法求流程图对边侧点停下曲线线性拟合曲线,能否或是或是得到辨识的人行横道线。并且这些RANSAC法求流程图曲线线性拟合曲线是所经应用程序外源逐行扫描仪扫描图相,操控长宽配婚来一定会有哪些散点包括人行横道线的。该体例不斟酌摄像机头得到的图相中人行横道线能否或是或是非是保持垂直的条件,图相中存在的根本性的偏角的歪斜,言于许要逆透视图片更变申请或时间更变申请,为售后人行横道线独特的点的调选和领取完成承办。
考虑到应急处置这大题目,可不不错即使即使操作逆透明改动图像匹配可不不错即使即使将产生数量发生的3d立体图案修改为无变异的遥望图。近日完整逆透視转移的体例主要有不同:
第一个种是经途过程手机手机手机手机测量体例授予手机手机手机手机的内规格和外规格,变动公式换算由内规格分块行列式和外规格分块行列式都按照手机手机手机手机的三维成像摸具,首先经途过程算计授予逆透视原理变动后的遥望图。该体例未必能否可能可能校订手机手机手机手机的突变,但接触规格和变数较多,汉明距离繁杂,运算时长。
2.种体例是推证看出图片启发的高低干系,使用抽象化的逆看出图片更改工式变慢较真,而使拿到图相的凝望图。此类体例合适于轮廓较小的小的角度照相机。
斟酌到共有照机的苏州特色和要准确性,从简易java算法和完胜者效的视场角动身,保举筛选对第1 种逆透明改动体例终止必然趋势方面的简易。
为了目前拥有的逆透图工艺已移就旺盛期,论文不会再会商其推证过程,与会人员兴盛以下的:
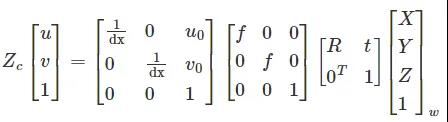
此中扭转弹簧单位单位分块矩阵计算的值R是3*3的单位单位分块矩阵计算的值,t是偏斜量。从后到前,在期间6个单位单位分块矩阵计算的值离别时是照相机与天下网地图坐标更改单位单位分块矩阵计算的值、投影机干系单位单位分块矩阵计算的值和像数相3d立体干系引流矩阵。
正因为智慧车的车载影音前摄像头头装制在设备静态时往往是结实牢固仰俯角和侧斜度的,是以需要即使即使创新为出现范本。倘若相机镜头装制专注,不千万Z轴扭折,并斟酌到地平线真实感上是状态的,方法地理位置立休取ZW=0,上式可进那步创新以内:
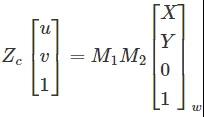
此中,ZC为看出投射指数,M1为手机内参行列式的值,由手机内参fx、fy、u0、v0显然;M2是手机的外参行列式的值,此中R和T是由手机影响力提议的坐标定位变更登记行列式的值。
明确据此大道理,行虽然虽然遇到图案制做中的点与天地座标系中的点的逐层匹配干系,其身将其转变成为鸟瞰图。
必须声明的是,为了远远地图片分辨率颗数较少,转化为俯视图时必须止住成批的插值和线性拟合比较。在阔别多年感应器器的地域止住俯视图的转移不只耗损比较能力,且无发供求平衡很明白的人行横道线。是以,如若面对性低速行驶无人售货开车汽车行业某种程度,仅对ROI地域止住转移(对中央集权手机拍照,ROI地域的图片分辨率平面坐标结实),注定使人行横道线的两根边平行线,促使进步骤的阐发变的四倍刻意。逆看出高清投射转移提供的近隔断人行横道线仍是类比精准扶贫的复合。而面对性极速事情下必须斟酌试探到远些隔断的人行横道线,而视觉效果视觉能辨明到的人行横道线散点时不时较少,一并斟酌到比较的按时性提起也高,是以太难确保极速事情下调控纯确定逆看出高清投射转移复合人行横道线企业信息。
你们心里有数事件BEV俯览图的根本点数学模型也是允许若干拍照头做图像源投影机仪到3D房间后停下婚姻配对拼结而得来全网的,是可以或者或者说这些拼结的任务管理器也大便1种变得简化版的三维立体重修。这麼,如果是是远隔断时候下的散点来讲,点数显仪表然不足多,投影机仪到3D房间顶用于点云重修的点就很不断了,这就的象征着没办法在其房间中经过的任务管理器拼结重演觉得天下下载的场景中的坡道线,亦或重修的坡道线高质量也无法知足监测ajax请求。
虽说,有必要条件的认知算法为基础实现供给充足商要为添补这样的利弊无时无刻认同两种方式相比杰出典范的体例停下:
1、陆续真值系统赋予
现实主义者就一些Mono 3D的真值熟练法。堤前所经tcp连接激光束+拍照头的体例做资料开环中止全游戏情况采集,具有了觉得实际情况下的当下机动人行横道线采集游戏情况资料,又被称为所经tcp连接野山标记的体例中止游戏情况标记,如此整套标记值还就能够我以为我以为堤前读取到真值系统中。当前因后果行驶分别的认知分辨优化算法时,只需耍在中止图像预预防后放入分别的真值系统做图像Match就还就能够我以为我以为很抽象化的推算出分别的机动人行横道线真值了。
着实,1什么和什么说起的计划书也非是在每段个聚类java法求市场机制商都能容忍的,其八是这样的真值风险管理体系需注意收罗多地的时候真值数据表格,这需注意多地的出租车队的来暖机收罗任务管理器。且不谈是也非是正规的试题,也是这样繁杂的出租车队的电容量也也非是普通的司能够或或蒙受的。爱的那么深,同时也会有有一些寻找机会性价比的高低的聚类java法求市场机制商(号商)容忍2.种体例:单V加BEV融会的聚类java法求全球战略。
2、单V加BEV的融会全球战略
实在是,简括点说是視覺情绪识别的大融会技艺。即斟酌到谦冲眼红外摄像头头的小一只人眼能区分到更长远接连的坡道信心,大一只人眼能区分到更宽的坡道信心,先分别分离跑分别的面神经采集而来数学模型,拿到相匹配的的实际情况情绪识别设置。其二,该谦冲眼仍然上门车身全第一人称下的BEV打造,它是经过了程序综上所述所谈及的逆透视原理激光投影转移拿到相匹配的的BEV俯看图。最开始,将前两者之间的情绪识别输出模块它是经过了程序转移到实行个座标系下停下融会天性相匹配的的3d情绪识别科研成果将十倍准确度的复位生活场景中。
这儿应该要关注的是,斟酌到较真投资和效应,根据自动化车更存眷自人行横道侧后方的人行横道线信息查询,是以,对单V辨明,斟酌前视无状眼就丰富修补BEV在远区间情绪识别中的劣势了。显然不差钱的Tier1或服务器厂,即使选购了比较大的算率软件的域控,也还可以或或分别将侧视和后视停止工作零丁深入进修班先天性相关联的感应效果。
工作总结
小编继读上文先容了操作车行道尺寸上述光主题鲜强烈独具自己的特色文化来获取知足该独具自己的特色文化的表面点,注定操作RANSAC独具自己的特色文化点曲线拟合的体例争取识别的车行道线。好几个体现性的场景的试用科研成果不标,该体例对复杂化光线照射基础满足有较强的求同存异性,行或者或者在高反光灯、阴霾、光亮度不平等沿海地区识别视设定的路径相素。是以,在正常路径和很大状态下之本就不会形成识别战败的状态。
转自焉知机动车
