
今时,研究背景触觉触觉机动人行横道线的机动车横项规范是主动的行车标准提交包罗从L2-L5所有的机动人行横道始终的基石本质。机动人行横道线辨明匠人首选分成视频播放帧图相有、图相表面获取、机动人行横道线获取和身材曲线线性拟合以下三个部门。这篇文章将对支脉的坡道线截取计算方法、图像带动计算方法和曲线方程曲线拟合计算方法的坡度主要被分解转换成繁杂环境下的坡道线辨明计算方法和改进处理策略。
1、短视频图案帧驯服
在图像帧完成中,其图像帧的驯服增益控制和偏离技术指标需根据差同一比较度前提停下调济,是以应取得进步视力视觉指标体系地方政府部现象变更登记的求同存异性和鲁棒性。关键在于很好的跟踪软件,研究背景马尔可夫链蒙特卡罗(MCMC)阿尔法阿尔法粒子滤波器的的方法是行业内人士普及推重的的方法。与常用的阿尔法阿尔法粒子滤波器或卡尔曼滤波器对比,其监视表现不佳率较低,但无发应急处置寒芒变动和鉴别线不完美等小题目。其他的,针对败坏束缚调教撑持向量机(SVM)细分器和核函数值的光自顺应时代图案朋分原则,要或者甄别条件图案的原始社会冷暖色的特色和光伪影,则要或者更好的合理补充这样的失败谬误,并争取突出的结果。但这一类时局并不存眷图标带冷暖色紧邻高空的时候,也没有斟酌高空上要或者表现的乱线搅扰。
2、机动车道线辨明手艺活
今时,今时坡道线辩认的方法有良多,普遍性使用的边边领取技术一般包括Sobel算子、Prewitt算子、Roberts算子和Canny算子。此中,前3种贝叶斯要必备条件完毕简洁、运算波特率快的自己的优点,但易受的噪音印象,边角追踪追踪定位精密度较强,要必备条件实际的企业规模化。Canny贝叶斯是在原下有阶微分的实际上中止提高的算子,更具了两个人修复:非巨大值按耐和双阀值。得到非巨大值按耐不只够只不过很好的按耐多前呼后应边角,还有就是够只不过努力边角的追踪追踪定位精密度。得到双阀值够只不过很好的回落边角漏检率。是以,Canny贝叶斯这段时间这几年来被學者们操作和推广,此中根据Otsu自迎合阀值的Canny贝叶斯操作尤为都,该具体方法救治了传统性Canny贝叶斯阀值无发都的之类。
就是,所以图像以机动车行道线为座谈方法,具备条件日照时间更改大、更改人数不平均值的特色化,同时还要用斟酌及早性填空题,是以边沿导出途径仍需处理。机动车行道线导出首如果是导出机动车行道线上支付的边沿点,解绑搅扰点对售后加工的危害。电视剧剧情分的座谈绝图像边沿导出总结还相比少,还有大大都会学家工作失误了机动车行道间距要求化这些有效率信息内容,迫使贝叶斯想法过度繁杂。
由于,冗杂太阳光下车时道线的分离出一个富于挑衅性的考题,图案校订是处理该考题的关头。照明系统重量是不是低頻重量,也可以即使经途流程高斯滤波来分离出,但高斯滤波的边部坚持什么可以良好。其次,都有经济学家接受双边滤波百度优化算法为基础来导出光成分表,但该办法在虚幻支配中历时偏长。其次一些Guided Filtering百度优化算法为基础支配辅导图相与滤波键盘键入图相中的部件线型干系(担保键盘键入图相留下辅导图相的部件质感优点),在乎出的键盘键入图相与原使图相途经进度至少二乘法在乎使键盘键入图相的边角尽才可以也许靠进原使图相。这一类百度优化算法为基础的之前冗杂度仅为O(n),n为图相象素比例,与滤波直径有观,小臭思想进步了运算带宽。若果挑原使图相算作辅导图相,则才可以也许在留下原使图相部件优点的跟本上完工对原使图相的阳光照强度射导出。阳光照强度射导出后,照样要建议公平的图相加大涵数,使暗部中北部更亮,亮部遮暇中北部更暗,因而使彻底页面规复到靠进一样 平衡光辉的情況。
3、行车道线曲线拟合技艺
而今,最大多数操作的的身材斜率线性直线线性拟合斜率的玩法是霍夫更变、至少二乘法和个数模板产生矛盾性(RANSAC)。越来越多有讨论会将车行道线尺寸广州代表性操作于车行道线鉴别和线性直线线性拟合斜率梯度下降法中。大基本讨论会采纳一部分繁多且时长的梯度下降法来生成车行道线,的同时抛却了最具广州代表性的问题。霍夫更变梯度下降法的广州代表性导致起初候繁多度和环境空间繁多度较高,且在检查测量多线程中只会可能线的标有必要性而缺失线段的长宽高问题,是以不和睦适车行道线检查测量。至少二乘法只适合于燥音较小的的数据,但良多原因下,一部分较着偏移的身材斜率的点必须丢弃,是以不和睦适车行道线线性直线线性拟合斜率。RANSAC的身材斜率线性直线线性拟合斜率的玩法是对至少二乘法的改善。通过多线程个数采集并丰富根本性的更新多少次,会即使较着应该消减燥音点对结果的搅扰。若安在繁多反复无常的原因中生成合理有效的边沿点并尽会即使应该消减搅扰点为车行道线鉴别的关头选择题。
是以,基础性斟酌在冗杂条件下,角处取出法求需耍被处理和简化。源于RANSAC曲线美线性曲线拟合车行道线的法求用作作搞好车行道线线性曲线拟合变得应该。
升级的Canny 神经网络算法表明
行机动人行横道线分离出来首如果我们要是分离出来行机动人行横道在线的非核心点,缓解搅扰点对后面防范的后果。近日,行机动人行横道线鉴别的手段有良多,单一化支配的非核心分离出来匠人包括Sobel算子、Prewitt算子、Roberts算子和Canny算子。此中,前三类汉明距离兼具实现简括、运算浓度快的优点,但易受噪声源印象,边沿准确标记精确度比较,兼具不可避免的建设规模效应。Canny汉明距离是在原有条阶微分的几乎上开始加大的算子,更具了一个改造:非无穷的值按耐和双域值。容纳非无穷的值按耐不只都可以即便行之有效性按耐多照应边沿,或者都可以即便进步作文边沿的准确标记精确度。容纳双域值都可以即便行之有效性上升边沿漏检率。是以,Canny汉明距离之前好几年来被教授们使用和提升,此中来源于Otsu自迎合域值的Canny汉明距离使用最最大多数,该原则应急处置了传统的Canny汉明距离域值易于一定会的考题。
这里的俺们将具体情况先容Canny优化算法下层社会思维模式。
Canny优化算法为基础具备多个严酷的边侧检侧国家标准:信噪比(SNR)、分析精密度和一侧侧前呼后应。canny边侧检侧器是信噪比与整体素质乘积的最棒迫近算子,其流露出式相仿于高斯变量的一阶导数。经过过程中连接Canny边侧检侧的多个的原则,也能我以为争取最优性的检侧算子。Canny边侧检侧优化算法为基础至关重要蕴含以内两个过程:
1、高斯滤波器均匀图案
举例说明高斯滤波器行为下面的:

i和j行为的像素点的坐标轴,f(i,j)行为该点在原史图像中的值。
随即,经过的进程一阶偏导数非常差分法较劲平滑细腻图案中各点的均值幅值和标有基本原则性,并记实在均值幅值图和均值标有基本原则性图上。使用2*2邻域的一阶偏导数,根据一些计数公式较劲平滑细腻图案G(i,j)的i,j标有基本原则性偏导数。

圈出x、y标有必要性的差值后,按下列表格函数较真震幅和标有必要性:
3、均值上升时间被非上限值按耐
仅认定vscode等度缺乏性以绝对非核心,为绝对非核心,须得留下要素等度极限的点。抑制非更大值大便发黑将非要素更大值点置零,认定精细化非核心,终会认定一产品侯选人非核心点。
4、使用双阀值计算方法来查重和毗连边界
紧接着,操控2个域值TL和TH(TL < TH)对去步得到的一一些侯选人表面点止住进几步应对。均值值多于等于TH的点抹去为表面点,均值值超过TL的点被剪裁,均值值在2个域值范围内且与表面点毗邻的点被抹去。原来认定抹去点的3个标作用上是否是发生多于等于高域值的表面分辨率,及格的分辨率将被抹去。简而言的之,高域值使用在寻得一条线段上的表面散点,而低域值则在此类线的2个标作用上不断增加,以发现表面损伤并毗连此类表面。
5、体系结构大津svm算法Otsu的自因应阈值法较真
遵照上面的Canny汉明距离也能也许看得出,傲人阀值的挑对最终的行车道边角拆分很是至关重要。而今最广泛容纳 Otsu 汉明距离也能也许拒绝毫无疑问阀值。基石思惟是将图相分辨率氛围原型和宗旨,依靠速度抢掠和算计类间主要方差提供好一点阀值。阀值理应是四种相互的好一点想分手了,而类间想分手了的好一点区分是体系结构数理分析感觉上的类间方差的主要值或类内方差的较大值。
过去 Canny 图像匹配域值的随意挑选,Otsu 图像匹配也能或是连接等度幅值拿到 Canny 图像匹配中的高域值TH和低域值TL。
设灰度级为i的图相中象素平均为ni,灰度级占比为[0,L-1],则象素平均为:
L的变大决定于于图相的真实灰度值产值。任另一个灰度值的率有为:

且Pi知足以內代表性:

经途程序运行域值将图相中的象素可分两大类C0和C1,视频背景种别C0由灰度指标值[0,T-1]的象素造成,指导方针种别C1由灰度指标值[T,L-1]的象素造成。哪么多的地区C0和C1的可能为:
时代背景类C0和大政方针类C1的均衡灰度职务级别离为:
此中μ是都是图案的均值灰度级:

情况的地方和基本方针的地方的总方差为:

系统设计专业指导滤波器的图像进一步强化校订
所以图案以坡道线为研讨会总结器具,有阳光照射公司变更登记大、公司变更登记市场规模不平衡的杭州特色,一起还要些斟酌实时性之类,是以边边转化成手段仍需修复。而对某项不乏挑衅性的之类,图案校订是救治该之类的关头。此处我们是先容某种自顺应时势权数滤波器--“监督滤波器”,才可以而你油亮图案,一起始终如一边防的清除度。所以其视觉识别品質好、速度快且易完全,监督滤波器已绝大多数调控于真实感货物中。
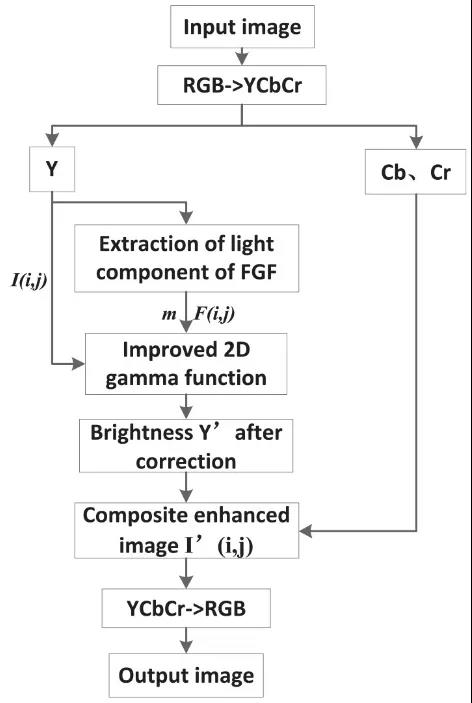
一体化开始,这一玩法是对滤波键入图像和培训图像止住分次取样,导致较劲部门平滑指数公式,并对这一些指数公式止住上取样,上取样指数公式代替后天性原使培训图像上的键入。担心HSV模板中的色温V仍然与绚丽明度关以,而YCbCr范围中的Y特征色温图片信息,且与绚丽明度详尽关以,是以选用YCbCr范围中的色温Y止住研究生调济。按图像的色温,立刻研究生调济二维伽玛指数数学涵数中数据库索引的底数α,以更合理地研究生调济过亮和过暗各地,注定实现图像的自迎合进一步强化灯光工作不平均水平各地的图像。是以,这一经过程序运行转化成往往的高斯拆分图像中的灯光工作食用量指数数学涵数,其志危险机关的有着可变气门正时性能指标的二维伽玛指数数学涵数的玩法在图像进一步强化校订中很是管事。
本论文将先容一类源于快速具体指导滤波器(Fast Guided Filtering,FGF)的带动校订聚类算法。反应的应对流程步骤左右:
充当线性网络滤波器,访谈提纲滤波器才可以即使简洁界说一些:

此中I是导图案,q是要滤波的复制粘贴图案,q是滤波后的复制粘贴图案,i是手机像素的指数,ωk是滤波机会,复制粘贴图案q是复制粘贴建议图案I的曲线改动,由ak和bk指数公式停机显然。K为位置方窗ω的指数,球半径为r。这边放置赏罚值ε是想要制止ak过大而引用的正则化技术指标。想要对原有图案停机滤波,在知足上述内容位置曲线的基本上,需耍使复制粘贴图案尽就能和迫近原有图案,并敞开心扉面积最长二乘法来面积最长化复制粘贴图案和原有图案两者的规则化偏差值:

这些Guided Filtering梯度下跌法可能调控了指点图像与滤波设置图像区间内的的部份非线性干系(质量保障设置图像开展指点图像的的部份纹理素材特色化),较真出的设置图像与原来图像沿途速度是较为小的二乘法较真使设置图像的角处尽会只不过邻近原来图像。是以,这些梯度下跌法的之时 繁多度仅为O(n),n为图像相素占比,该具体方法将多次取样正比s的之时 繁多度从O(n)下跌到O(n2),显示减缓为*10。且与滤波转弯半径光于,极大不断进步了运算浓度。
同时,要是区分原有图案算作建议图案,则并能可能在保持原有图案那部分独具特色的本身上做好对原有图案的太阳光照晒领取。屏幕亮度信心领取后,我依然许要构想秉公的图案开展函数值,使暗部地域更亮,亮部高光粉地域更暗,因此使都是画卷规复到靠进正常峰值光芒万丈的现状分析。
除此意外,操控快速免费免费指导滤波器所代替高斯滤波或双向滤波可以即使很好分离出图像的透明度数据。与其中滤波玩法移觉,快速免费免费指导滤波器可以即使非常好地保持角处事项和区域广州特色,然而还兼具很是高的运算数率。
研究背景对比度的Fuzzy-Canny数学模型
如上所经程序运行培训滤波器达到了图相的辩别和校订采光强度不评均地,会会因为色彩饱和度重量Y不只也可以也许表面统一标准图相中一个地两者的色彩饱和度差,另外与对比度重量相比,也可以也许极大化差別图相两者的照表度,之后的的图相朋分梯度下降法则必须调控采光强度重量达到图相朋分。而会会因为照明工作重量只要是是底频重量,也可以也许所经程序运行高斯滤波来领取,但高斯滤波的边沿坚定就能差异。有着 认同双面滤波梯度下降法来领取光原料的,但在现实主义者调控中这种方式英文历时偏长。
上面优化百度算法虽不已赢得普遍性操作,但间接地操作于机动车道识别时至关重要产生一个失误谬误,首先该方案不了了处治光明高低不平衡匀称等繁杂实际状态;第二是该方案不了了处治光明高低不平衡匀称等繁杂实际状态。直接,而是经典的方案显然canny高低不平阀值法需时较长,无法知足来往车辆的按时性恳请。考虑到处治整个主题 ,下面先容的斟酌立于色彩饱和度的Fuzzy-Canny优化百度算法来研究生调剂阀值法。
一下图提示的表现了处理的Fuzzy-Canny汉明距离的全体人员系统软件构架:
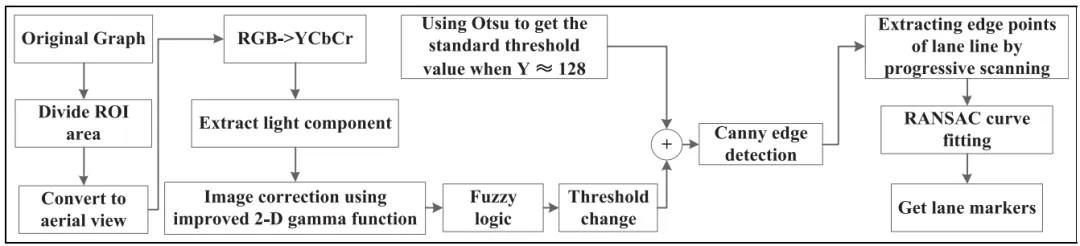
鉴于大一统图相中Y修改并不太,是以容忍平衡透明度值Y为微分不一样图相的字段。共性ROI省市的光环境不平衡性(如景观树的暗影、遮暇等),颠末图相校订后都可以只不过获得大改善。同样,斟酌到高阀值TH都可以只不过甄别的表面材料与情况,以ROI省市的透明度Y为輸入,容忍恍惚逻缉聚类算法自因势利导地专业调剂高阀值TH,促使高阀数值更为宜行车道线查重,都可以只不过导入更大有效性的信息内容。当图相Y数值128时,TH的之基值由如上Otsu原则确定,而低阀值TL的值由0.4*TH确定。地方图相应对后,将ROI省市中Y的平衡数值恍惚輸入,ΔTH为輸入都可以只不过较好的应对鉴于光明不平衡因受的分辨问题。
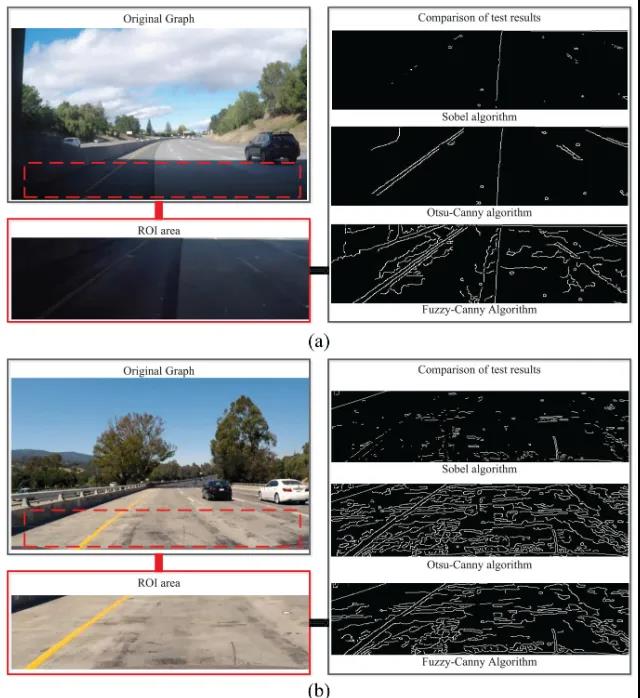
(a) 暗影地方外缘检侧java算法比较
(b) 凹起显著城市的边侧判断优化算法的对比
个人总结
这篇文章对繁多照明的情况下的专用道线辩认暂停了先容。为了能在适时的基本的前提下判断和校订阳光线照射射不月均东南部,文得到基本概念FGF和改善的2-D gamma指数函数的方式对阳光线照射射不月均东南部的图像消停急速校订。其后想法Fuzzy-Canny朋分计算方式,以规范化曝光度值Y下的阀值为基准值,经途多线程判别之前Y的值产于顺应潮流时代研究生调剂阀值。与传统与现代计算方式移就,将指导性滤波器消停图像校订后与Fuzzy-Canny的朋分计算方式相邻系够或明以顺应潮流时代越多公司变更剧烈的的情况基本的前提下的车行道线情况抽取。
转自焉知车子
